SYS.STATUS: ONLINE
ROBOTICS_CORE_V1.0
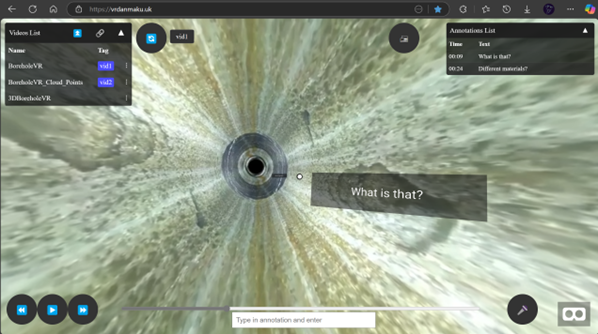
> INIT_VISION_MODULE...
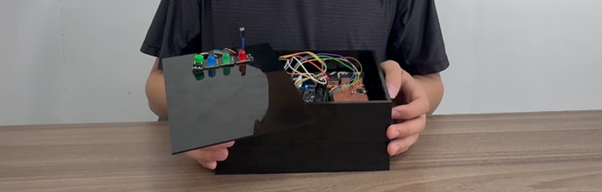
> LOAD_KINEMATICS...
> SYSTEM: READY.
PWR: 100%_
LON: 02°13' W
LAT: 53°27' N
Zhikun Peng
MSc Robotics Student | Future Robotics Engineer